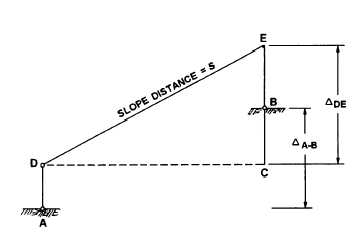
Figure 12-5.—Slope reduction using difference in elevation.
electro-optical systems, however, have the EDM
transmitter built into the theodolite. In this way, the
vertical angle and the slope distance can be observed
simultaneously. In some of these models, there is a
vertical offset between the electrical center of the
transmitter and the optical center of the theodolite. Also,
the height of the EDM reflector may not be at the same
height as the target used to observe the vertical angle.
For these conditions, you still need to consider these
vertical offsets in the reamer described above.
Slope Reduction Using the Difference in
Elevation Between End Points
Now let’s refer to figure 12-5 to see how to reduce
a slope distance using the difference in elevation
between two stations.
In figure 12-5, the EDM transmitter is located at
station A and has an h.i. equal to AD. The reflector, at
station B, has an h.i. equal to BE. The ground elevations
at A and B are known and the difference between these
elevations is designated &-B. To reduce the slope
distance, s, you first determine the difference in
elevation between D and E. This can be done using the
following equation:
In other words, & = &-B – h.i. of EDM + h.i. of
reflector.
Now, looking again at figure 12-5, you see that CDE
is a right triangle; therefore, since the slope distance was
observed and recorded using the EDM, and having
calculated ADE, the horizontal distance, CD, can be
simply determined using the Pythagorean theorem.
ELECTRONIC POSITIONING
SYSTEMS
Three classes of modern positioning systems are
used to determine positions on the surface of the earth.
Two of the classes are the initial positioning systems
and the doppler positioning systems. The initial
positioning systems require experience with navi-
gational systems on board aircraft, and the doppler
systems deal with signals received from satellites. Both
systems are beyond the scope of our discussions;
however, the doppler positioning systems will be
discussed briefly at the EA1 level in part 2 of this
TRAMAN. The third class of positioning systems is the
electronic positioning systems.
Electronic positioning systems consist of specially
designed short-to-medium range EDMs that are
attached to, or built into, a theodolite and can be used to
determine distances and directions from a single setup
of the instrument. Although many different electronic
positioning systems are manufactured, each individual
instrument is classed into one of three general groups as
follows:
1. Combined theodolite and EDM. Instruments
within this group consists of an optical-reading
repeating or direction theodolite with an attached EDM
transmitter that can be removed for independent use of
the theodolite.
2. Computerized theodolite and EDM. The
instruments in this group are similar to those within the
combined theodolite and EDM group but have built-in
electronic computers.
3. Electronic tachometers. The equipment in this
integrated, digitized, electronic systems consist of a
digitized theodolite, microprocessor, and EDM
transmitter incorporated into one instrument. The
instruments in this group also can be equipped with
solid-state memory and magnetic tape or punched-
paper-tape storage units for storage of data.
The above systems can be applied to nearly any type
of surveying that is discussed in this or the EA3
TRAMAN; however, for the normal day-to-day work
that the EA surveyor performs, you will have little need
for these types of instruments since most of the surveys
you perform require only lower-order precision. When
its use is justified, however, an electronic tachometer
is available as augment equipment for the Naval Mobile
Construction Battalions. The equipment consists of an
electronic digitized theodolite, an EDM unit, a
microprocessor, a keyboard and display register, and a
data storage unit. By inputting certain controlling data,
12-5